


2020.03.8
ブリッジに替わるパーシャルデンチャーの設計例と天然歯「形…
2020.01.16
最もシンプルな片側パーシャルデンチャー設計例 動画でご紹…
2019.12.26
保険パーシャルデンチャーの制作設計思想への新たな提案

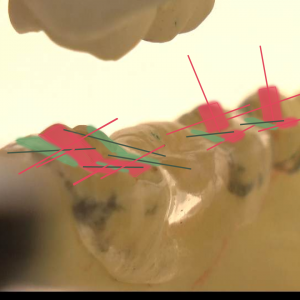
かみ合わせに秘められたモノ。
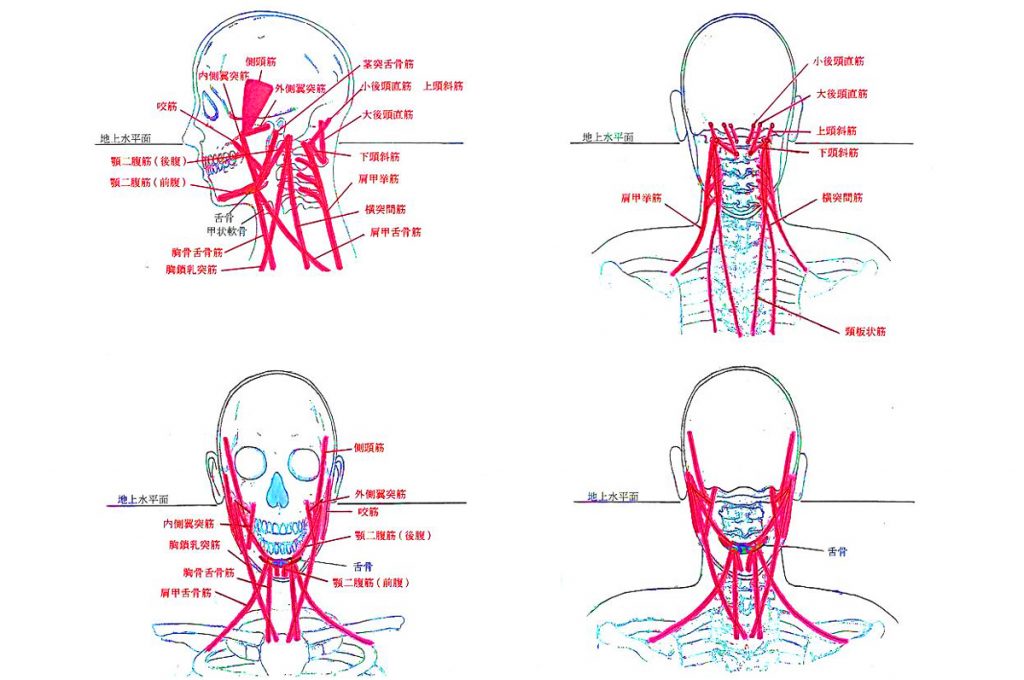
歯牙や歯列の「斜面」「湾曲」「咬耗面」を解析し、「顎の位置」を診断する。
坪補綴所(つぼほてつしょ)
〒039-2731
青森県上北郡七戸町後平126-50
tel/fax 0176-68-4869